D 問題の MaxFlow に続いて、これまた、人生で一度は解くべき超典型問題ですね。そして、D 問題とは違うやり方で、二部グラフを作ることにも注目です!
問題概要
のグリッドがあり、各マスには数値が書かれています。
これらのマスからいくつか選び、選んだ数値の総和が最大となるようにしてください。ただし、
- どの行についても、その行に含まれる選んだマスの個数が
個以下
- どの列についても、その列に含まれる選んだマスの個数が
となるようにします。また、総和が最大となる選び方を具体的に 1 つ示してください。
制約
解法
「グリッドを見たら二部グラフを作る」という典型テクニックを使います。ただし、グリッドから二部グラフを作る方法としては、全く異なる 2 通りのものがあります。
- 行番号を左側ノード、列番号を右側ノードとした二部グラフ (今回)
- グリッドを市松模様に塗り、黒色マスを左側ノード、白色マスを右側ノードとした二部グラフ (D 問題など)
今回は、1 の方法で二部グラフを作ります。下図のように、左側に行番号、右側に列番号を並べます。行 に対応する頂点と列
に対応する頂点とを結ぶ辺には、重さ
を付します。

このとき、求める問題は「どの頂点についても、選ばれた辺の接続本数が 本以下となるように辺を選び、選んだ辺の重みを最大にする問題」となります。
なお、 であれば、いわゆる最大重み二部マッチング問題ということになります。今回は、同じ頂点に
本までは接続が許されるので、マッチングを拡張したものと言えるでしょう。
最小費用流問題に帰着する
最大重み二部マッチング問題 ( の場合) が最小費用流問題へと帰着できることはよく知られています。詳しくは次の記事を読んでみてください。また、最小費用流問題とは何かを知らない方も、この記事を読んでみてください。
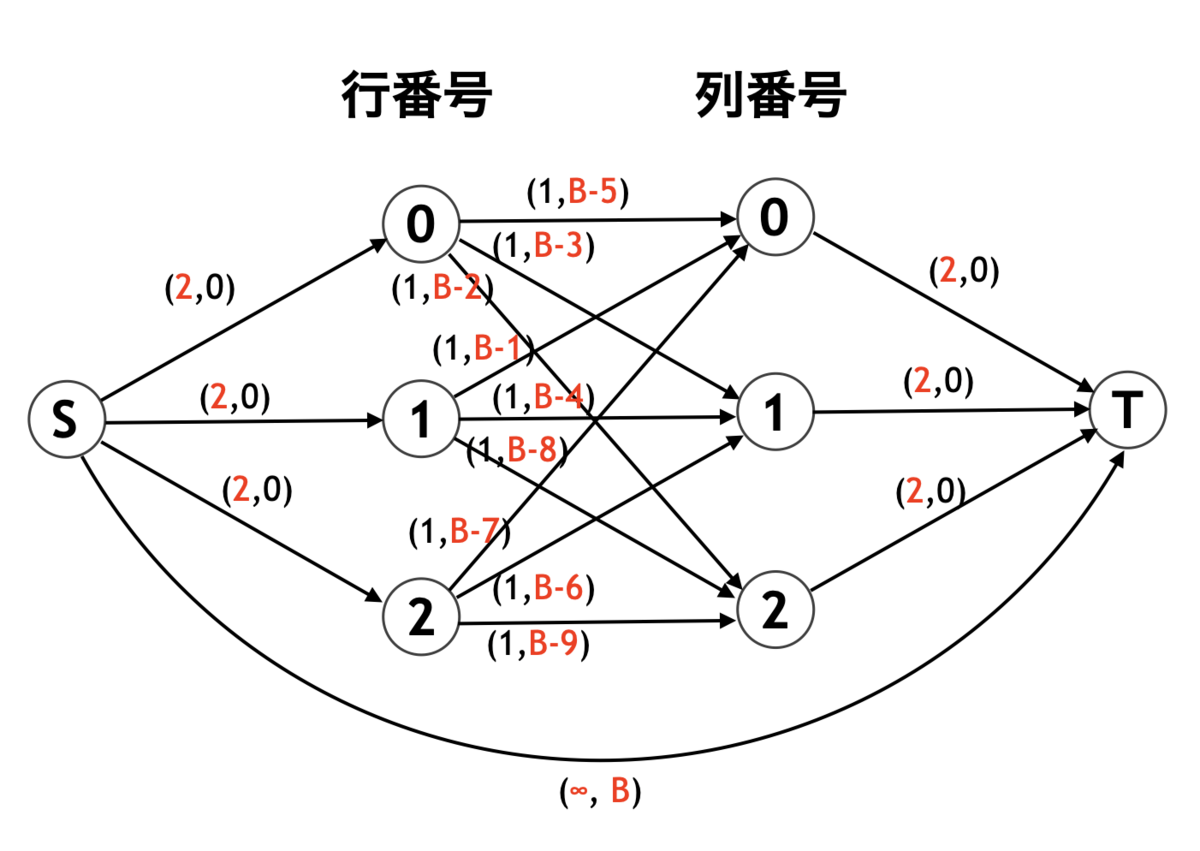
今回も同様に、最小費用流問題へと帰着することができます。超頂点 を用意します。
そして、次のように辺を張って、フローネットワークを作ると良さそうです (実際はダメです)。問題の制約に対応するところは赤色にしています。
- 行
に対応する左側頂点から列
に対応する右側頂点へは、容量
、コスト
の辺
から左側頂点へは、容量
の辺
- 右側頂点から
へは、容量

最初のところで、コストを というように、マイナスをつけているのは、「最大化問題」を「最小化問題」に変換するためです。
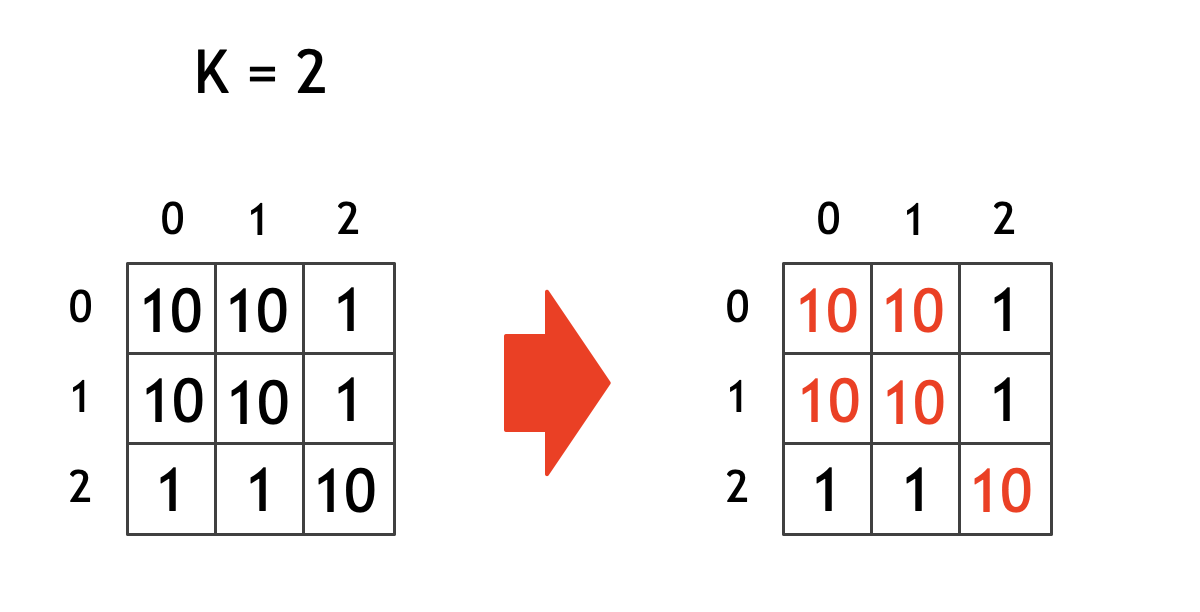
さて、こうして作ったフローネットワーク上で最小費用流を求めればよさそうです。しかし、最小費用流を流すときには、通常、流量を指定します。一見すると、流量 の最小費用流を求めればいいように思われるかもしれません。しかし、入力例 2 にあるように、あえて選ぶマス数が
個未満になるようにした方が最適になる場合があるのです!
下図が実際の例です。各行各列ともに 個まで選ぶことができるのですが、行 2 と列 2 については、1 個選ぶような方法が最適となっているのです。
工夫 1: から へとバイパスを作る
このような場合に対処する定石があります。それは、次のようなバイパス辺を新たに張ることです。
- 行
- 右側頂点から
- 頂点
、コスト

このグラフで改めて、流量 の最小費用流を流せばよいでしょう。余分なフローはバイパスに流れてくれます。
工夫 2:負値をなくす
しかし、まだ問題があります。ACL のドキュメントによると、追加する辺のコストは負値であってはいけないようです。
そこで、二部グラフの左右を結ぶ辺とバイパス辺に対して、一律に十分大きい定数値 を足すことで、コストが負値になるようにします。このとき、流量
のフローを流せば、フローのコスト値は一律に
だけ増加することに注意します。
最終的に、最小費用流の値が res であったとき、選んだ数値の総和の最大値は B * N * K - res によって求められます。
最終形
次のネットワークを作り、流量 の最小費用流を求めます。
- 行
の辺
- 右側頂点から
- 頂点
の辺を張る
コード
最小費用流問題を解くアルゴリズムについては、解説を他資料や他記事に譲ります。たとえば、蟻本に解説があります。
ここでは、ACL の提供している最小費用流アルゴリズムを活用します。ACL の提供するネットワークフロークラス
mcf_graph<Cap, Cost> (Cap は容量や流量を表す型、Cost はコストを表す型) には、次のメソッドが用意されています。
int add_edge(int from, int to, Cap cap, Cost cost):頂点fromから頂点toへ、容量cap、コストcostの辺を張る (返り値は辺番号)pair<Cap, Cost> graph.flow(int s, int t, Cap flow_limit):頂点sから頂点tへ、流量がflow_limitを超えない範囲で、流せるだけ流す (返り値は {流せた流量, 最小費用流値})vector<mf_graph<Cap, Cost>::edge> graph.edges():辺集合を返す
なお、各辺を表す型 mf_graph
struct edge<Cap, Cost> { int from, to; Cap cap, flow; Cost cost; };
これらの仕様を元にして、グラフネットワークを構築して、最小費用流を流し、フローの流れた辺を特定して、選ぶマスを復元しましょう。
次のように実装できます。
ACL を用いた実装
#include <bits/stdc++.h> #include <atcoder/mincostflow> using namespace std; using namespace atcoder; void ACL_practice_E() { // 十分大きな値 const long long B = 1LL<<40; // 入力 int N, K; cin >> N >> K; vector<vector<long long>> A(N, vector<long long>(N)); for (int i = 0; i < N; ++i) for (int j = 0; j < N; ++j) cin >> A[i][j]; // フローネットワークを作る // 行番号に対応する頂点を 0, 1, ..., N-1、列番号に対応する頂点を N, N+1, ..., 2N-1 とする // 超頂点の番号を S = 2N, T = 2N+1 とする mcf_graph<int, long long> G(N * 2 + 2); int S = N * 2, T = N * 2 + 1; // 行と列を結ぶ for (int i = 0; i < N; ++i) { for (int j = 0; j < N; ++j) { // 容量 1、コスト B - A[i][j] G.add_edge(i, j + N, 1, B - A[i][j]); } } // 超頂点 for (int i = 0; i < N; ++i) { G.add_edge(S, i, K, 0); // 容量 K, コスト 0 G.add_edge(i + N, T, K, 0); // 容量 K, コスト 0 } // バイパス G.add_edge(S, T, N * K, B); // 流量 N * K の最小費用流を流す (最大流量も受け取るが N * K になることは分かっている) auto [max_flow, min_cost] = G.flow(S, T, N * K); // 復元する vector<string> grid(N, string(N, '.')); const auto &edges = G.edges(); for (const auto &e : edges) { // 超頂点が絡む辺や、フローの流れなかった辺はスキップ if (e.from == S || e.to == T || e.flow == 0) continue; // 行 e.from、列 e.to - N が選ばれる grid[e.from][e.to - N] = 'X'; } // 出力 cout << B * N * K - min_cost << endl; for (int i = 0; i < N; ++i) cout << grid[i] << endl; } int main() { ACL_practice_E(); }
自前ライブラリでも AC
自分用に整備した最小費用流ライブラリでも AC した。
#include <bits/stdc++.h> using namespace std; // edge class (for network-flow) template<class FLOWTYPE, class COSTTYPE> struct FlowCostEdge { // core members int rev, from, to; FLOWTYPE cap, icap, flow; COSTTYPE cost; // constructor FlowCostEdge(int rev, int from, int to, FLOWTYPE cap, COSTTYPE cost) : rev(rev), from(from), to(to), cap(cap), icap(cap), flow(0), cost(cost) {} void reset() { cap = icap, flow = 0; } // debug friend ostream& operator << (ostream& s, const FlowCostEdge& e) { return s << e.from << " -> " << e.to << " (" << e.flow << "/" << e.icap << ", " << e.cost << ")"; } }; // graph class (for network-flow) template<class FLOWTYPE, class COSTTYPE> struct FlowCostGraph { // core members vector<vector<FlowCostEdge<FLOWTYPE, COSTTYPE>>> list; vector<pair<int,int>> pos; // pos[i] := {vertex, order of list[vertex]} of i-th edge // constructor FlowCostGraph(int n = 0) : list(n) { } void init(int n = 0) { list.assign(n, FlowCostEdge<FLOWTYPE, COSTTYPE>()); pos.clear(); } // getter vector<FlowCostEdge<FLOWTYPE, COSTTYPE>> &operator [] (int i) { return list[i]; } const vector<FlowCostEdge<FLOWTYPE, COSTTYPE>> &operator [] (int i) const { return list[i]; } size_t size() const { return list.size(); } FlowCostEdge<FLOWTYPE, COSTTYPE> &get_rev_edge (const FlowCostEdge<FLOWTYPE, COSTTYPE> &e) { if (e.from != e.to) return list[e.to][e.rev]; else return list[e.to][e.rev + 1]; } FlowCostEdge<FLOWTYPE, COSTTYPE> &get_edge(int i) { return list[pos[i].first][pos[i].second]; } const FlowCostEdge<FLOWTYPE, COSTTYPE> &get_edge(int i) const { return list[pos[i].first][pos[i].second]; } vector<FlowCostEdge<FLOWTYPE, COSTTYPE>> get_edges() const { vector<FlowCostEdge<FLOWTYPE, COSTTYPE>> edges; for (int i = 0; i < (int)pos.size(); ++i) { edges.push_back(get_edge(i)); } return edges; } // change edges void reset() { for (int i = 0; i < (int)list.size(); ++i) { for (FlowCostEdge<FLOWTYPE, COSTTYPE> &e : list[i]) e.reset(); } } // add_edge void add_edge(int from, int to, FLOWTYPE cap, COSTTYPE cost) { pos.emplace_back(from, (int)list[from].size()); list[from].push_back(FlowCostEdge<FLOWTYPE, COSTTYPE> ((int)list[to].size(), from, to, cap, cost)); list[to].push_back(FlowCostEdge<FLOWTYPE, COSTTYPE> ((int)list[from].size() - 1, to, from, 0, -cost)); } // debug friend ostream& operator << (ostream& s, const FlowCostGraph &G) { const auto &edges = G.get_edges(); for (const auto &e : edges) s << e << endl; return s; } }; // min-cost max-flow (<= limit_flow), slope ver. template<class FLOWTYPE, class COSTTYPE> vector<pair<FLOWTYPE, COSTTYPE>> MinCostFlowSlope(FlowCostGraph<FLOWTYPE, COSTTYPE> &G, int S, int T, FLOWTYPE limit_flow) { // result values FLOWTYPE cur_flow = 0; COSTTYPE cur_cost = 0, pre_cost = -1; vector<pair<FLOWTYPE, COSTTYPE>> res; res.emplace_back(cur_flow, cur_cost); // intermediate values vector<COSTTYPE> dual((int)G.size(), 0), dist((int)G.size()); vector<int> prevv((int)G.size(), -1), preve((int)G.size(), -1); // dual auto dual_step = [&]() -> bool { priority_queue<pair<COSTTYPE,int>, vector<pair<COSTTYPE,int>>, greater<pair<COSTTYPE,int>>> que; que.push({0, S}); dist.assign((int)G.size(), numeric_limits<COSTTYPE>::max()); dist[S] = 0; while (!que.empty()) { auto [cur_cost, v] = que.top(); que.pop(); if (dist[v] < cur_cost) continue; for (int i = 0; i < (int)G[v].size(); ++i) { const auto &e = G[v][i]; COSTTYPE new_cost = e.cost + dual[v] - dual[e.to]; if (e.cap > 0 && dist[e.to] > dist[v] + new_cost) { dist[e.to] = dist[v] + new_cost; prevv[e.to] = v; preve[e.to] = i; que.push({dist[e.to], e.to}); } } } if (dist[T] == numeric_limits<COSTTYPE>::max()) return false; for (int v = 0; v < (int)G.size(); ++v) { if (dist[T] == numeric_limits<COSTTYPE>::max()) continue; dual[v] -= dist[T] - dist[v]; } return true; }; // primal auto primal_step = [&]() -> void { FLOWTYPE flow = limit_flow - cur_flow; COSTTYPE cost = -dual[S]; for (int v = T; v != S; v = prevv[v]) { flow = min(flow, G[prevv[v]][preve[v]].cap); } for (int v = T; v != S; v = prevv[v]) { FlowCostEdge<FLOWTYPE, COSTTYPE> &e = G[prevv[v]][preve[v]]; FlowCostEdge<FLOWTYPE, COSTTYPE> &re = G.get_rev_edge(e); e.cap -= flow, e.flow += flow; re.cap += flow, re.flow -= flow; } cur_flow += flow; cur_cost += flow * cost; if (pre_cost == cost) res.pop_back(); res.emplace_back(cur_flow, cur_cost); pre_cost = cur_cost; }; // primal-dual while (cur_flow < limit_flow) { if (!dual_step()) break; primal_step(); } return res; } // min-cost max-flow, slope ver. template<class FLOWTYPE, class COSTTYPE> vector<pair<FLOWTYPE, COSTTYPE>> MinCostFlowSlope(FlowCostGraph<FLOWTYPE, COSTTYPE> &G, int S, int T) { return MinCostFlowSlope(G, S, T, numeric_limits<FLOWTYPE>::max()); } // min-cost max-flow (<= limit_flow) template<class FLOWTYPE, class COSTTYPE> pair<FLOWTYPE, COSTTYPE> MinCostFlow(FlowCostGraph<FLOWTYPE, COSTTYPE> &G, int S, int T, FLOWTYPE limit_flow) { return MinCostFlowSlope(G, S, T, limit_flow).back(); } // min-cost max-flow (<= limit_flow) template<class FLOWTYPE, class COSTTYPE> pair<FLOWTYPE, COSTTYPE> MinCostFlow(FlowCostGraph<FLOWTYPE, COSTTYPE> &G, int S, int T) { return MinCostFlow(G, S, T, numeric_limits<FLOWTYPE>::max()); } void ACL_practice_E() { // 十分大きな値 const long long B = 1LL<<40; // 入力 int N, K; cin >> N >> K; vector<vector<long long>> A(N, vector<long long>(N)); for (int i = 0; i < N; ++i) for (int j = 0; j < N; ++j) cin >> A[i][j]; // フローネットワークを作る // 行番号に対応する頂点を 0, 1, ..., N-1、列番号に対応する頂点を N, N+1, ..., 2N-1 とする // 超頂点の番号を S = 2N, T = 2N+1 とする FlowCostGraph<int, long long> G(N * 2 + 2); int S = N * 2, T = N * 2 + 1; // 行と列を結ぶ for (int i = 0; i < N; ++i) { for (int j = 0; j < N; ++j) { // 容量 1、コスト B - A[i][j] G.add_edge(i, j + N, 1, B - A[i][j]); } } // 超頂点 for (int i = 0; i < N; ++i) { G.add_edge(S, i, K, 0); // 容量 K, コスト 0 G.add_edge(i + N, T, K, 0); // 容量 K, コスト 0 } // バイパス G.add_edge(S, T, N * K, B); // 流量 N * K の最小費用流を流す (最大流量も受け取るが N * K になることは分かっている) auto [max_flow, min_cost] = MinCostFlow(G, S, T, N * K); // 復元する vector<string> grid(N, string(N, '.')); const auto &edges = G.get_edges(); for (const auto &e : edges) { // 超頂点が絡む辺や、フローの流れなかった辺はスキップ if (e.from == S || e.to == T || e.flow == 0) continue; // 行 e.from、列 e.to - N が選ばれる grid[e.from][e.to - N] = 'X'; } // 出力 cout << B * N * K - min_cost << endl; for (int i = 0; i < N; ++i) cout << grid[i] << endl; } int main() { ACL_practice_E(); }